|
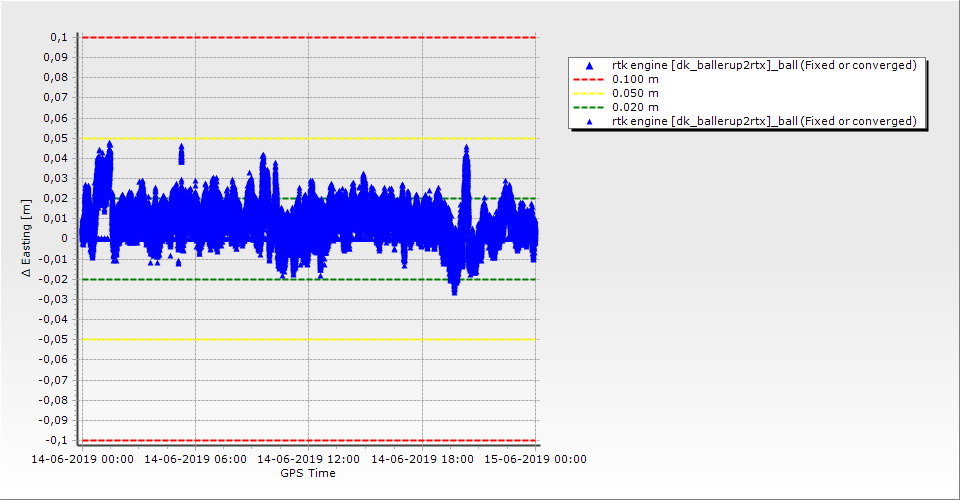
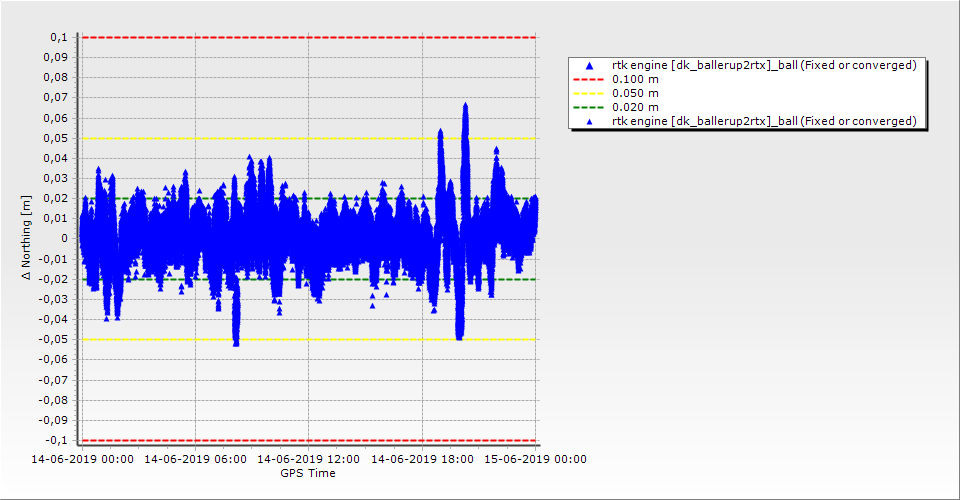
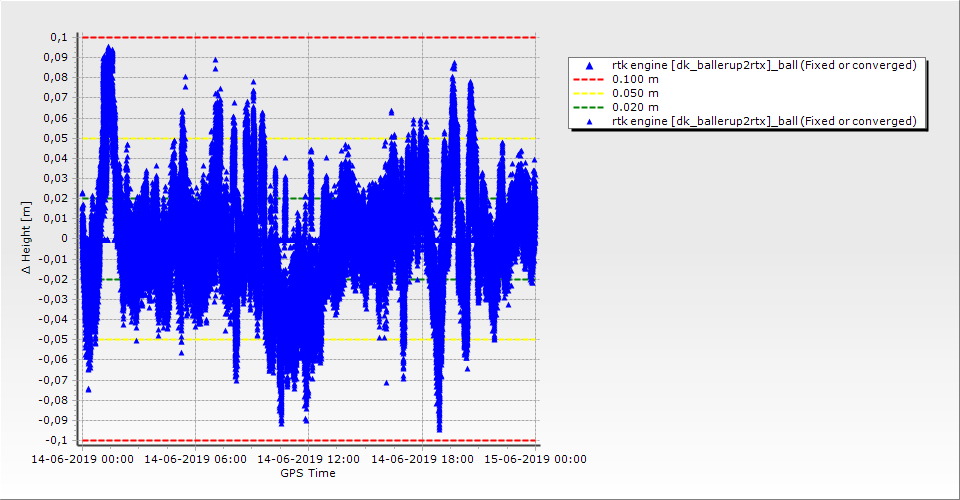
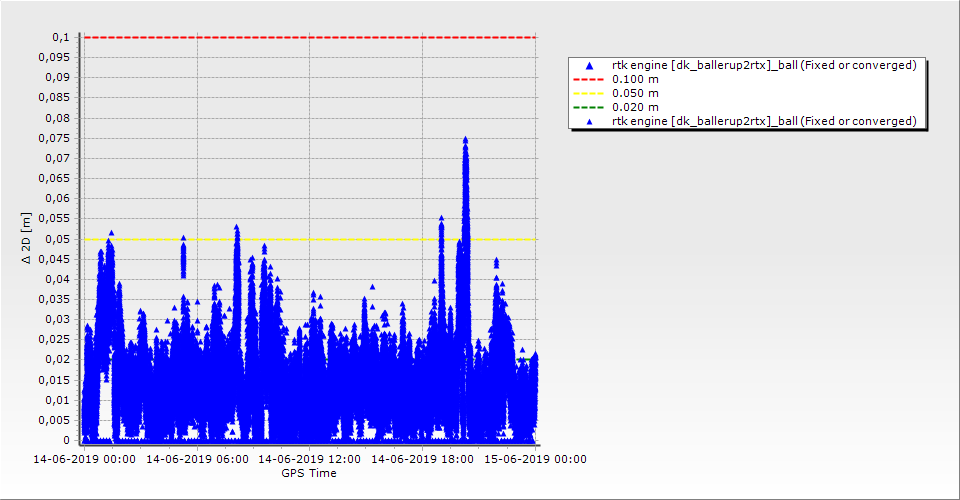
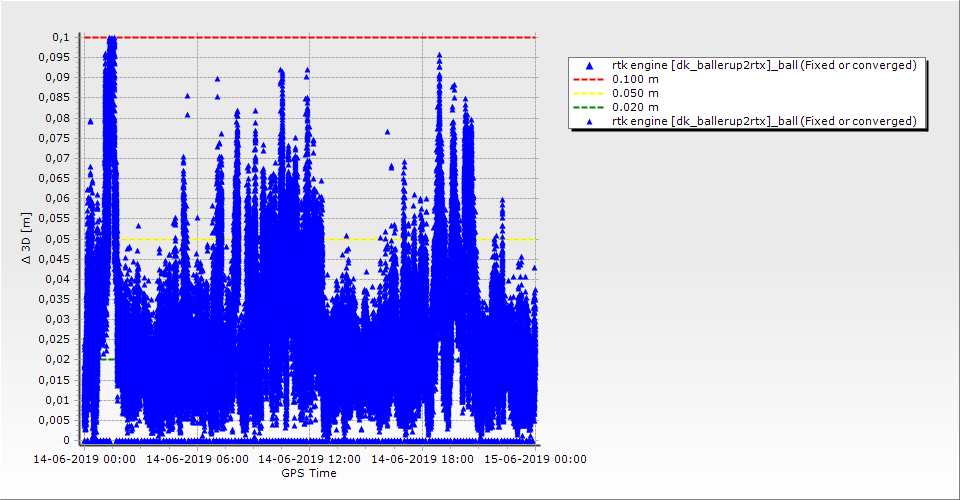
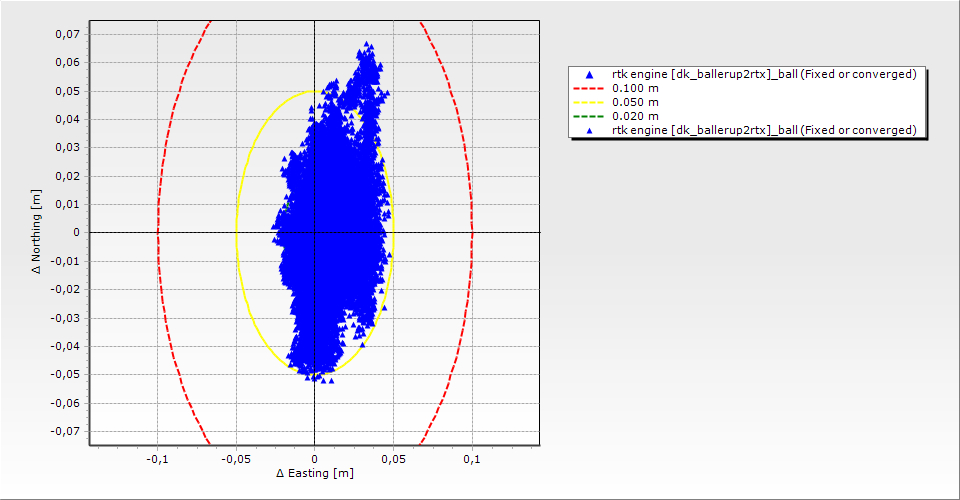
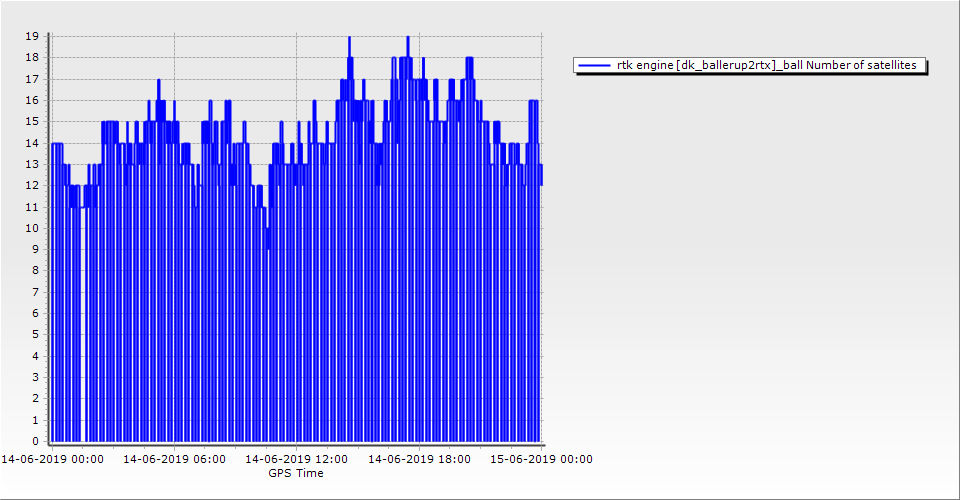
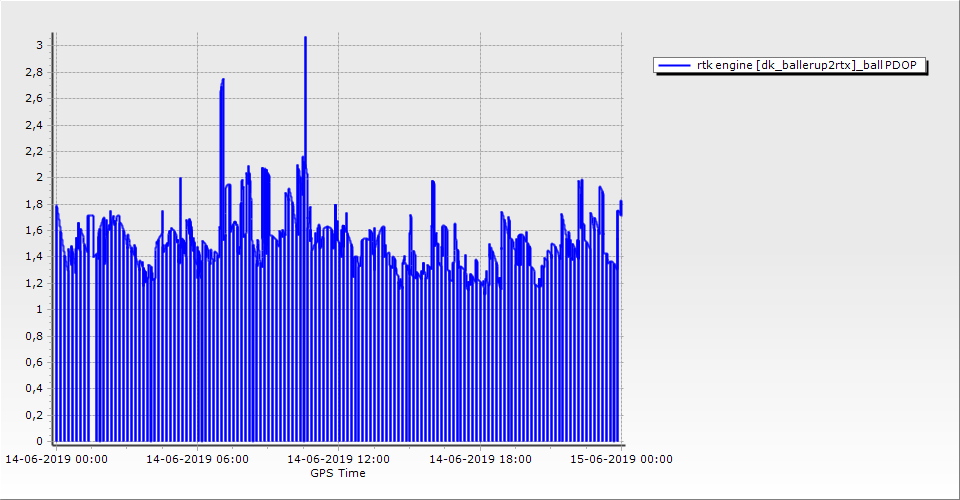
| Rover Integrity |
| Shows integrity of selected rovers |
| Company: | <Geoteam A/S> |
| Operator: | N/A (scheduled report) |
| Address: | <Energivej 34> |
| <Ballerup, 2750> | |
| <DENMARK, state> | |
| Creation Date: | 6/15/2019 12:30:09 AM |
| Time System: | GPS time |
| Report Interval: | |
| Start Time: | 6/14/2019 12:00:00 AM |
| End Time: | 6/15/2019 12:00:00 AM |
| Duration: | 1 Day(s), 0 Hour(s) |